
GO-1020MG (0.08s/60°, 7.5kg.cm)
 In Stock
In Stock


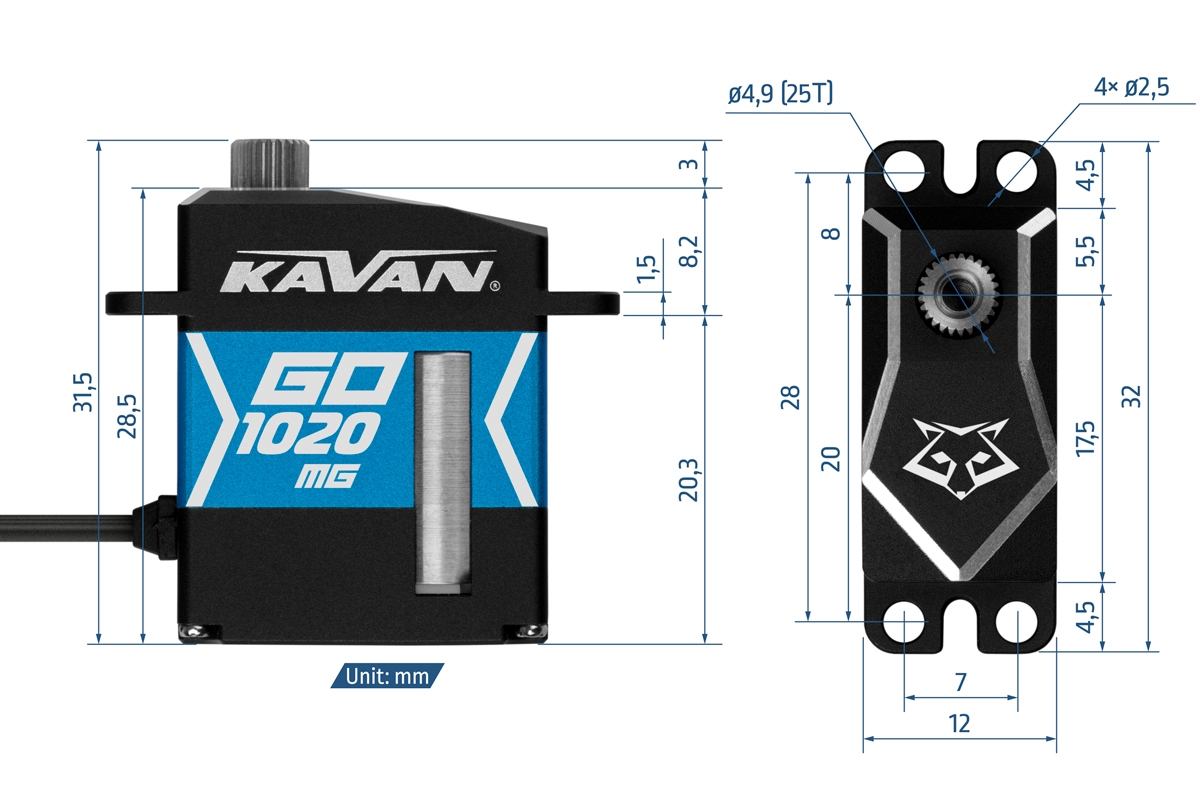
High torque and fast programmable digital micro servo with steel gears and with output shaft mounted on two ball bearings for use in RC models of all types. The flat 12 mm servo case makes it particularly suitable for controlling ailerons and flaps in RC glider models with thinner wing profiles. The servo is housed in an aluminium case for perfect cooling even under high loads.
Using the USB programmer/interface for GO servos and the PC operator program you can program a wide range of servo parameters (servo end-points, servo reverse and neutral position, overload protection, soft start, fail-safe, etc.).
Programmable functions
- Servo angle: Used to set the maximum travel of the servo. Default setting is approx. 120° at normal control pulse width range (900~2100 µs); approx. 180° at maximum allowed control pulse width range (500~2500 µs).
- Servo Neutral: Used to set the neutral (center) position of the servo.
- Damping Factor: Sets the servo's stopping behavior characteristic.
- PWM Power: Sets the output power of the servo. As higher the value is, the faster the servo is and the more thrust it has - of course, the current draw will be proportionally higher. Range: 39.2~100%
- Sensitivity: Adjusts the sensitivity (insensitivity bandwidth) of the servo. The higher the value - the narrower the insensitivity bandwidth - the servo will only move if the change in control signal width is greater than the insensitivity bandwidth. Setting the sensitivity value too high can cause the servo to oscillate in some applications. Range: Ultra High (Extra High - sensitivity bandwidth approx. 1 µs) - High (High - approx. 2 µs) - Medium (Medium - approx. 3 µs) - Low (Low - approx. 4 µs)
- Soft start: Enables/disables the soft start function. This function prevents the servo from abruptly moving into the operating position after power is turned on, thus reducing the risk of damage to the servo gears.
- Reverse: Reverses the sense of servo movement.
- FUTABA SR mode: Used only with FUTABA RC system working in SR mode. Do not turn this option on if you are using a different FUTABA RC system setting or any other brand of RC system.
- SANWA SSR mode: Used only with SANWA RC system working in SSR mode. Do not turn this option on if you are using a different SANWA RC system setting or any other brand of RC system.
- Fail-safe: If the control signal from the receiver is completely lost or if the servo cannot detect the signal properly (e.g. due to interference), the servo may enter one of three fail-safe modes:
- (a) Free: Fail-safe is disabled.
- (b) Maintain Position: the servo maintains the position corresponding to the last correctly received signal.
- (c) Transition to neutral: The servo returns to the neutral (1500 µs pulse width) position.
- Overload protection: enables or disables servo overload protection in three levels - once the overload has lasted for a preset time (in seconds), the servo output power is limited to the corresponding preset value (in % of max power).
- Reset: Restores the connected servo to its factory default settings.
Wide input voltage range 4.8-7.4 V (nominal).
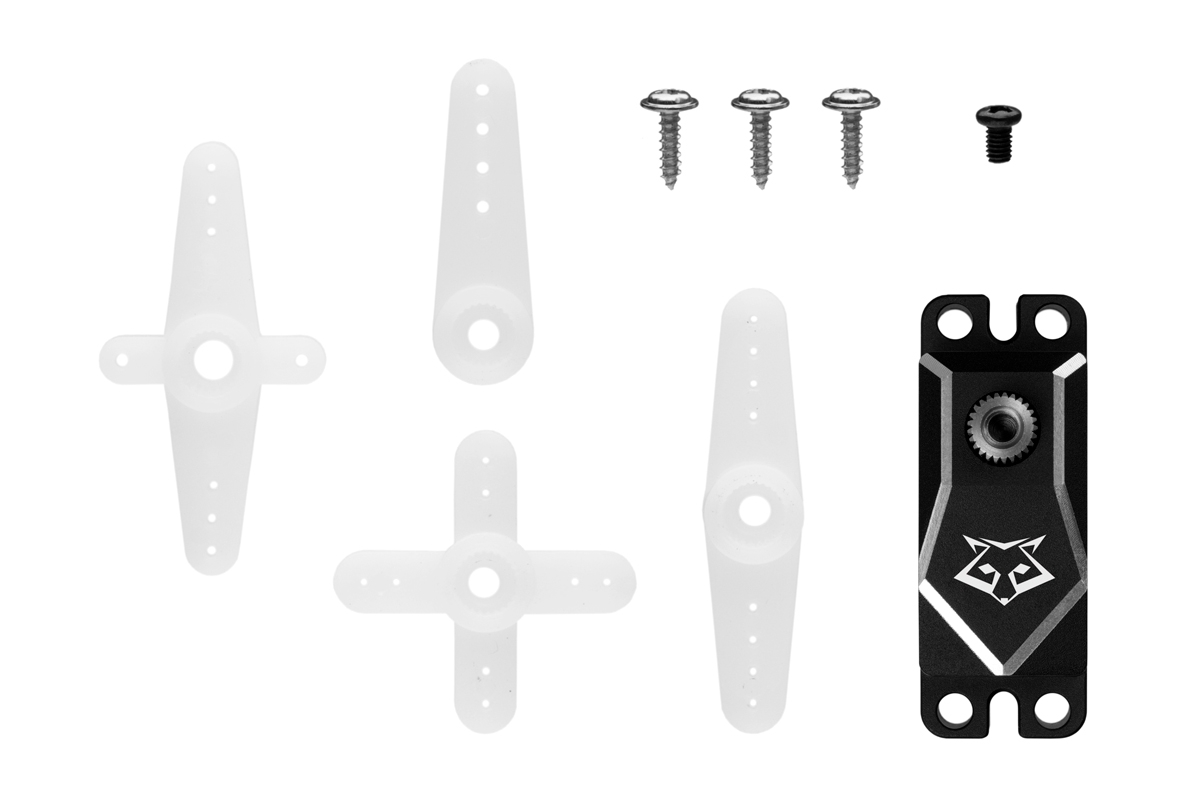
Output shaft with 25 teeth.
All GO servos are covered by an extended 3-year warranty.
| Servo dimensions | Micro |
| Servo type | Digital |
| Thrust at 4.8V [kg/cm] | 5 |
| Thrust at 6.0V [kg/cm] | 5.8 |
| Thrust at 7.4V [kg/cm] | 6.8 |
| Thrust at 8.4V [kg/cm] | 7.5 |
| Speed at 4.8V [s/60st.] | 0.13 |
| Speed at 6.0V [s/60st.] | 0.11 |
| Speed at 7.4V [s/60st.] | 0.09 |
| Speed at 8.4V [s/60st.] | 0.08 |
| Servo gears | Metal |
| Ball bearings | 2× |
| High-voltage | Yes |
| Power supply [V] | 4.8 - 8.4 |
| Length [mm] | 23 |
| Width [mm] | 12 |
| Height [mm] | 28.4 |
| Weight [g] | 20 |
| Intended for | Aeroplanes,Helicopters,On-road cars,Boats |




