
















KAVAN Pilatus PC-6 Porter 1500mm ARF - red
 In Stock
In Stock
The single-engine Swiss STOL utility aircraft Pilatus PC-6 Porter, originally powered by the Lycoming flat six-cylinder engine, made its maiden flight in 1959. Soon an improved Turbo-Porter powered by a turboprop engine followed. Over the years Turbomeca Astazou II, Garret Air Research TPE 331 and ultimately Pratt & Whittney Canada PT6A (about 70% of all PC-6 ever produced) turboprops have been taking this beautiful plane to the sky.
Incredible, almost helicopter-like short takeoff and landing capabilities have quickly gained the attention of military as well as commercial operators. Fitted with wheeled undercarriage, skis or floats, Porters have been serving reliably and relentlessly all over the world - flying over deserts, jungles, lakes, mountains, snow and ice - simply everywhere. No wonder the PC-6 holds the world record for the highest landing by a fixed-wing aircraft, at 18,865 feet (5,750 m), on the Dhaulagiri glacier in Nepal.
After 604 deliveries in 63 years, Pilatus ended production in 2022... And now you can enjoy flying with our 1500 mm wingspan semi-scale model of this beautiful aeroplane powered by a brushless motor.
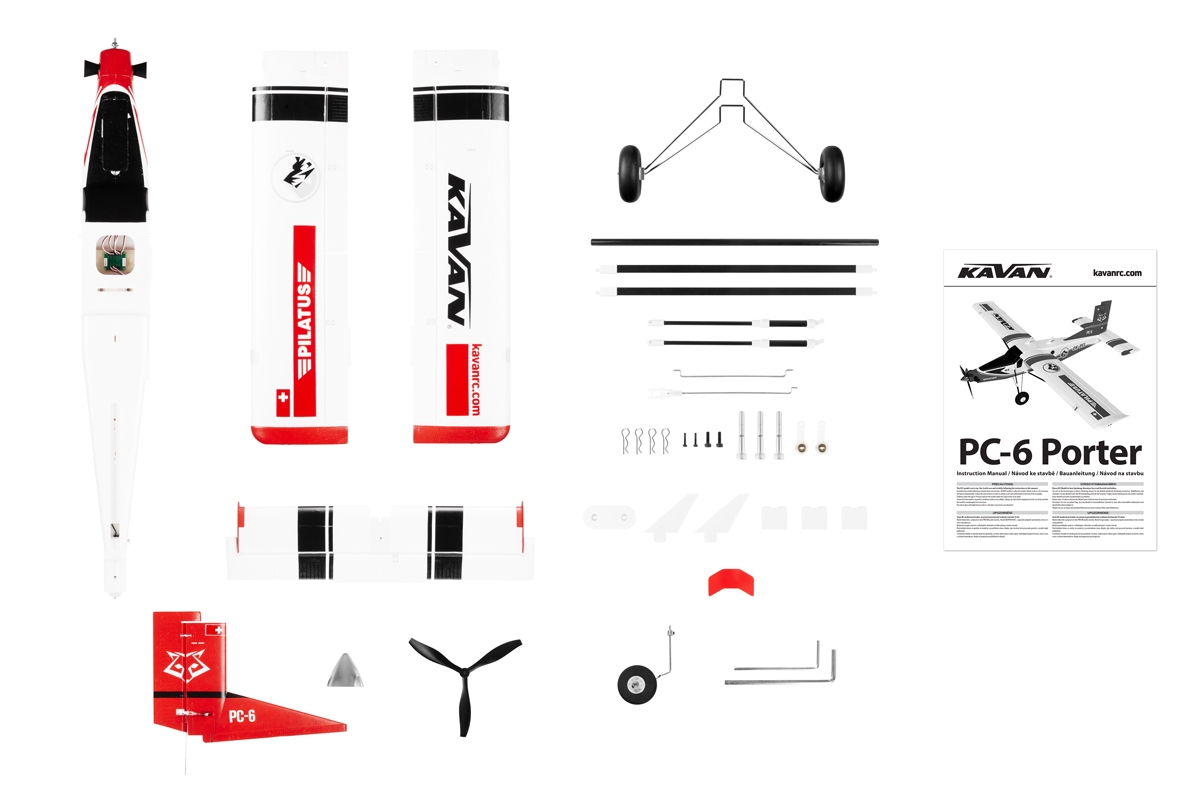
The EPO foam fuselage, thoroughly carbon-reinforced, comes with the KAVAN C3548-750 brushless motor, 10x6” three-blade propeller and KAVAN R-40SB ESC featuring a powerful switching SBEC stabilizer necessary to feed all 6 servos aboard. The battery compartment (under a removable hatch in the nose) offers a lot of space for your flight pack.
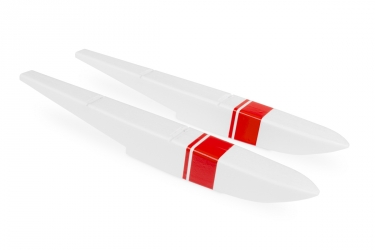
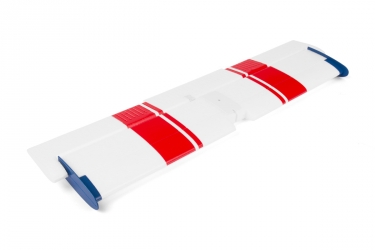
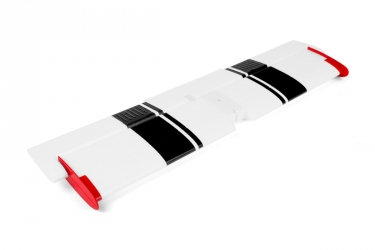
The two-piece EPO wing is reinforced by carbon spars and joined together with a carbon tube joiner. The wing is secured by bolts to the fuselage. The ailerons and flaps are controlled by two pairs of servos installed in the wing driven with short wire push rods; there are position and landing LED lights installed as well. The easy-to-install carbon wing struts are secured with a pair of wire clips.
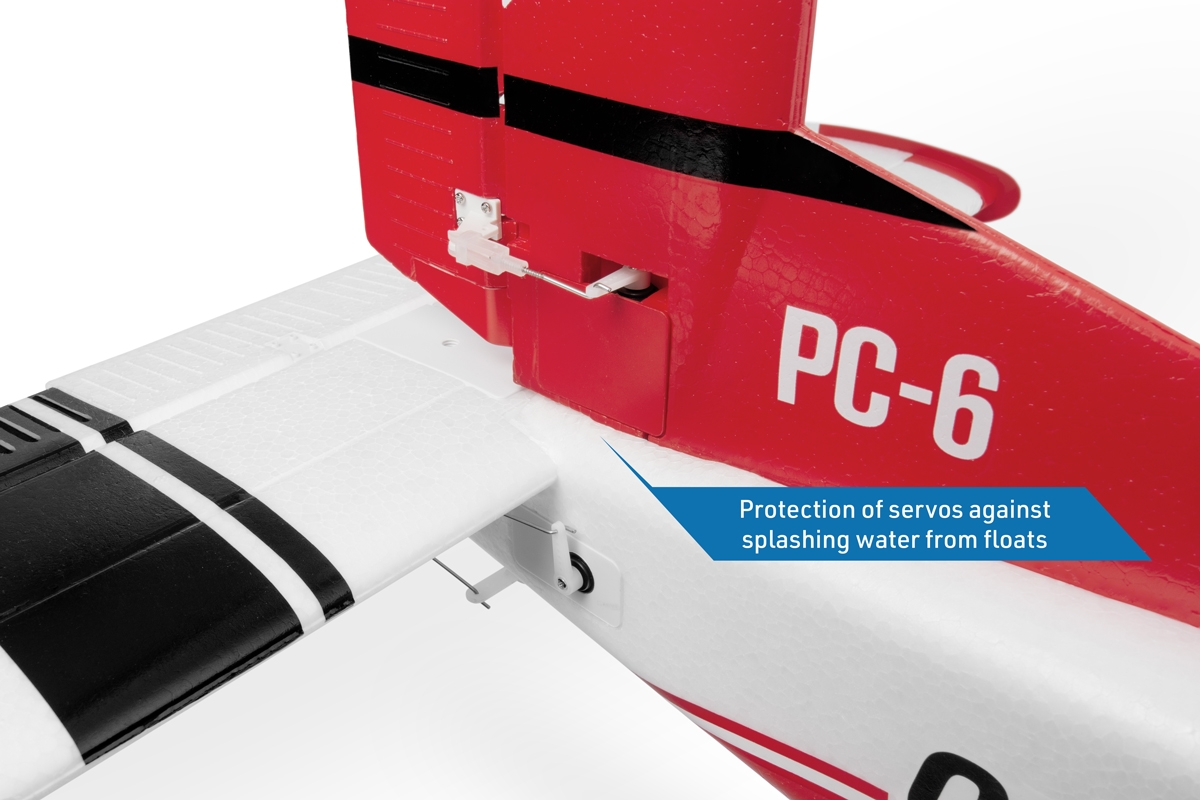
The empennage is made of the EPO foam. The elevator servo is installed in the fuselage, the rudder servo is installed in the fin and the rudder is controlled via wire pushrods.
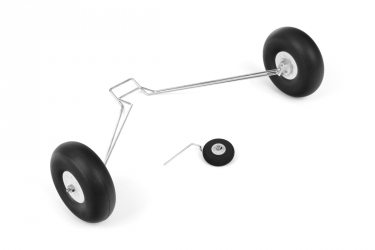
The main undercarriage has steel wire legs with scale telescopic struts; the steel wire tailwheel is coupled with the rudder. You can purchase optional floats set for your Porter - installation of the floats and water rudder is a matter of minutes.
PC-6 is powered by the KAVAN C3548-750 brushless motor with the KAVAN R-40SB 40A ESC.
You will need a 14.8 V 2600–3300 mAh flight pack (at least 30C) to fly your Porter.
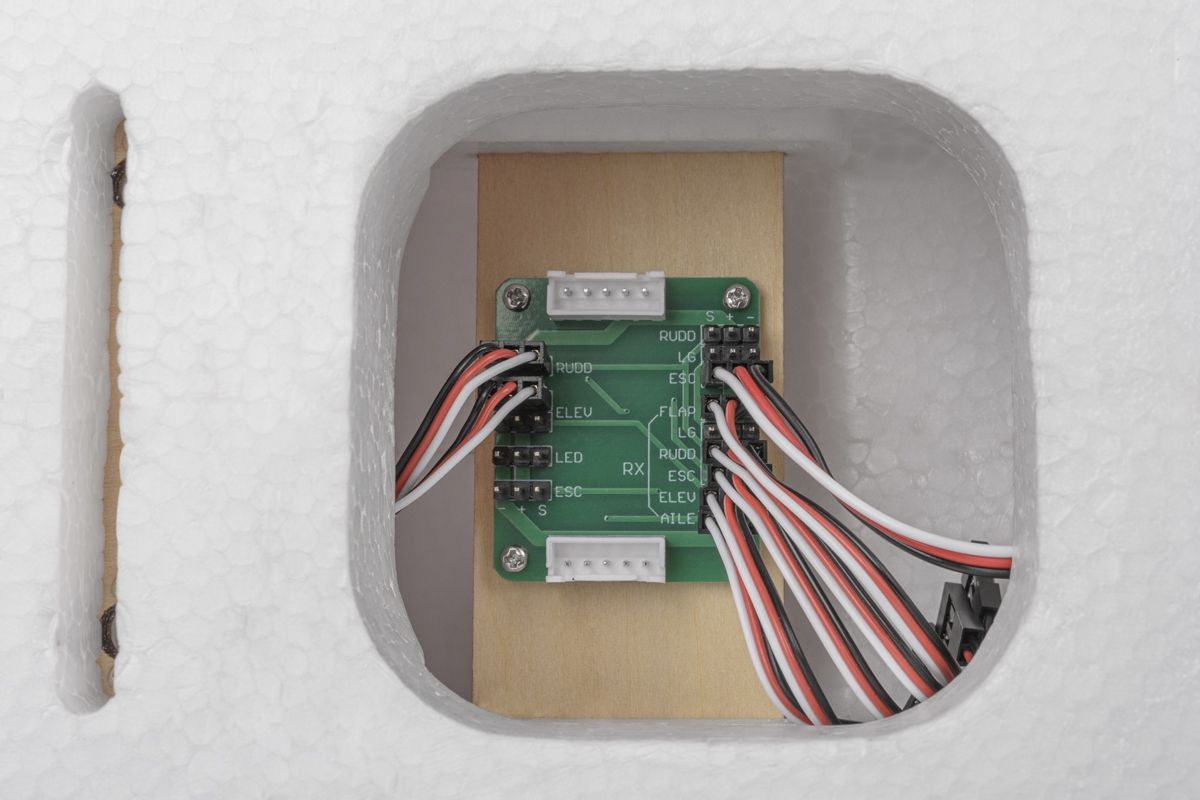
You will need at least a 6-channel RC set to control your PC-6; even a non-computer radio would work as the aileron, flap, rudder and elevator servos are controlled by a single channel each (linked via the pre-installed connection board). At least a 7-channel computer radio will work best; an independent aileron and flap servo control will help you enjoy your Porter to the fullest. Fortunately, even entry-level/budget-friendly radios like Radiolink AT9S or AT10II, Futaba T6K or T10J feature all the necessary mixes today. In this case you will have to connect the aileron and flap servos directly. The instruction manual contains a thoroughly tested set-up table in order to help you set up the PC-6 easily even if it was your first “full house” control aeroplane.
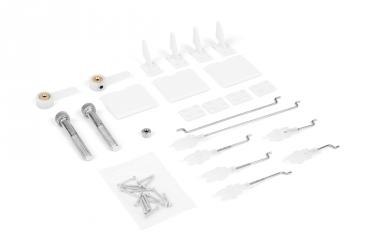
ARTF set contents: EPO fuselage with the brushless motor, 40A ESC, 10x6" 3-blade propeller and 2 servos installed, EPO wing with 4 servos and LED lights installed, EPO horizontal tailplane, undercarriage and instruction manual.
| Wingspan [mm] | 1500 |
| Length [mm] | 1112 |
| Wing surface [dm2] | 27.9 |
| Weight [g] | 1650 - 1700 |
| Controlled functions | S,V,K(2),M,F(2) |
| Build difficulty | S0,S1 |
| Operating difficulty | P2 |







Download
 |
Instruction Manual | 05.09.2023 |


